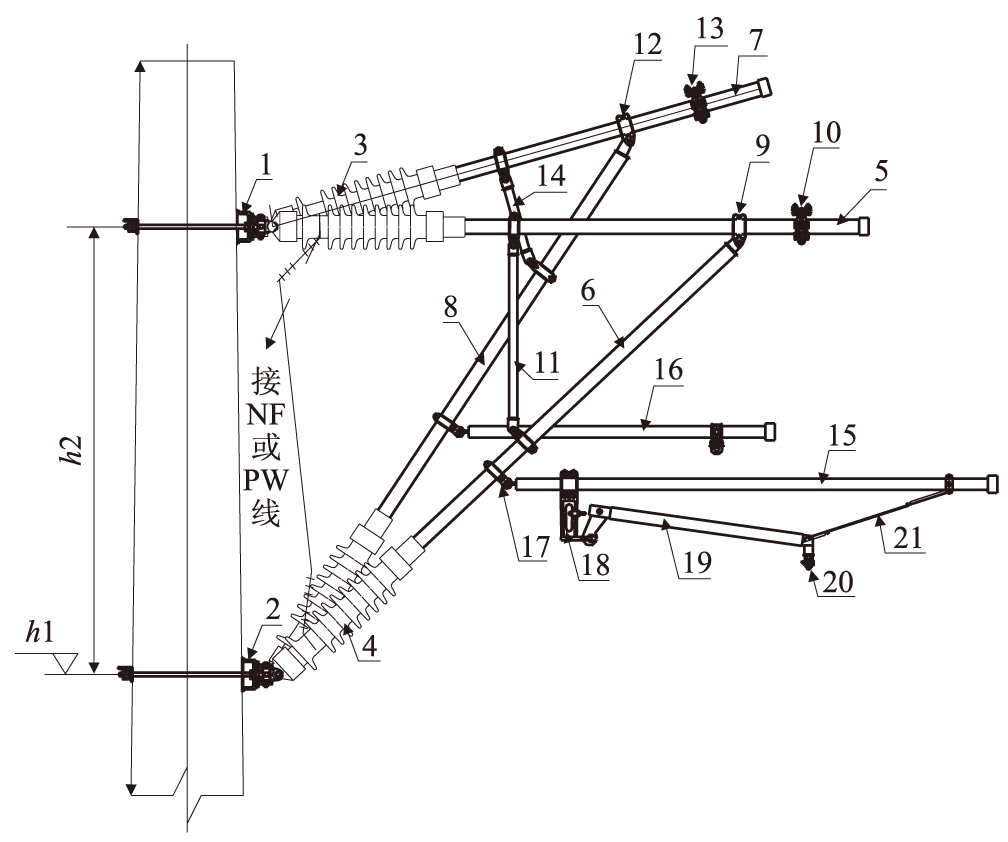
1.上底座; 2.下底座; 3.平腕臂绝缘子; 4.斜腕臂绝缘子; 5.平腕臂; 6.斜腕臂; 7.平腕臂(抬高支); 8.斜腕臂(抬高支); 9.套管双耳; 10.承力索座; 11.腕臂支撑; 12.套管双耳(抬高支); 13.承力索座(抬高支); 14.腕臂支撑(抬高支); 15.定位管; 16.定位管(抬高支); 17.定位环; 18.定位支座; 19.定位器; 20.定位线夹; 21.防风拉线
图1 正定位绝缘转换柱组成
李东伟
(中铁电气化局集团宝鸡器材有限公司, 宝鸡 721013)
摘 要:常用的钢腕臂计算方法是建立数学模型,将腕臂装置分解成几个直角三角形,运用勾股定律和相似三角形定律,在直角三角形中计算出平腕臂、斜腕臂、定位管长度,以及定位环的安装位置。多数采用Excel表格进行计算,结果相对精确,但界面不直观,公式易被修改。文章推导了腕臂计算公式,运用 Visual Basic编程软件,设置可视化的控件,定义多个未知变量,分双腕臂工作支和双腕臂非工作支计算两个程序模块,完成一个定型的程序界面。操作者只需输入每个模块需要的变量值,就可得到相应的结果,极大地简化了腕臂计算。
关键词:腕臂; 定位环; 定位管; 计算; Visual Basic软件
在接触网的安装中,道岔柱、中心柱、转换柱采用双腕臂底座,为使两支承力索能够顺利过渡,往往设计一支为抬高支。在我国,时速200 km以下的铁路,最常见的是三角腕臂结构,目前常用的计算方法是手工计算法和Excel公式计算法,这两种计算方法前者效率低、费时费力,后者界面复杂,计算参数及公式易因误操作而发生改变。Visual Basic6.0作为可视化编程的主流软件,用它开发腕臂预配计算软件是一种新的方法。
钢腕臂定位装置的主要组成如图1所示。在施工方的提料工作中,作为接触网三大计算之一的腕臂计算显得十分重要。本文提出的腕臂计算思路是先建立数学模型,将钢腕臂装置分解成几个直角三角形,应用勾股定律和相似三角形定律,在三角形中求出直角边或斜边的值。
1.上底座; 2.下底座; 3.平腕臂绝缘子; 4.斜腕臂绝缘子; 5.平腕臂; 6.斜腕臂; 7.平腕臂(抬高支); 8.斜腕臂(抬高支); 9.套管双耳; 10.承力索座; 11.腕臂支撑; 12.套管双耳(抬高支); 13.承力索座(抬高支); 14.腕臂支撑(抬高支); 15.定位管; 16.定位管(抬高支); 17.定位环; 18.定位支座; 19.定位器; 20.定位线夹; 21.防风拉线
图1 正定位绝缘转换柱组成
钢腕臂装置计算前,先对其计算参数进行设定,定义如下:
L1——平腕臂绝缘子单耳孔到金具远端底部的长度;
L2——斜腕臂绝缘子单耳孔到金具远端底部的长度;
L3——承力索座到平腕臂端头的距离;
L4——套管双耳和承力索座的距离;
L5——定位管安装防风拉线的预留长度;
Cx——限界,B1代表上底座宽度;
δ——安装后的支柱内缘相对于铅垂线的斜率;
Sp——上底座偏移值国;
H——结构高度;
h——承力索的抬高值;
h0——外轨超高;
h1——上下底座的高差;
h2——套管双耳的高度;
h3——承力索座的高度;
h4——定位管中心到接触线的高度;
h5——定位环高度;
DH——悬挂定位点处接触线距轨面的垂直高度;
L——轨距;
a1——设计拉出值;
a2——设计抬高支的拉出值;
m——定位点处接触线与线路中心的水平距离;
c——定位点处受电弓中心与线路中心的水平距离;
LP——工作支平腕臂的长度;
LX——工作支斜腕臂的长度;
LDWH——工作支定位环到斜腕臂单耳的安装位置距离;
LDWG——工作支定位管的长度;
LTP——非工作支平腕臂的长;
LTX——非工作支斜腕臂的长度;
LTDWH——非工作支定位环到斜腕臂单耳的安装位置距离。
以上参数除需要计算的参数外,其余在腕臂装置预配前可以通过现场测量、查询安装图、零件图来确定。
以正定位绝缘转换柱为例,其数学模型如图2所示。
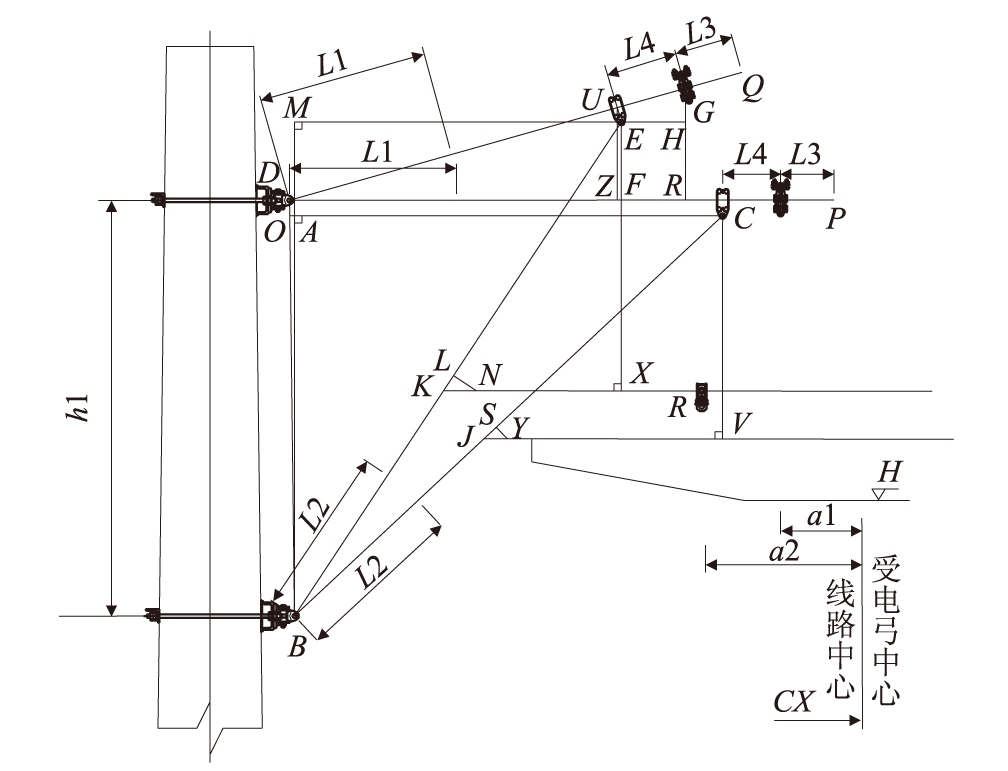
图2 正定位绝缘转换柱数学模型
3.1 工作支平、斜腕臂、定位环安装位置、定位管长度的计算
(1)工作支平腕臂长度计算
上底座的安装高度为导高加上结构高度减去承力索座的高度,上底座相对于柱底内缘偏移值:
Sp=δ×(DH+H-h3)/2
(1)
拉出值是指定位点处接触线距受电弓滑板中心的距离,在曲线区段,拉出值:
a1=m+c
(2)
式中:c=h0×DH/L。
m=a1-c=a1-h0×DH/L
(3)
工作支平腕臂长度:
LP=Sp+Cx-m-L1-B1+L3=δ×(DH+H-h3)+Cx- (a1-h0×DH/L)-L1-B1+L3
(4)
(2)工作支斜腕臂长度计算
上底座相对于下底座的安装偏移值:
OA=δ×h1
(5)
在ΔABC中,直角边AC的长度:
AC=Sp+Cx-m-B1-L4-δ×h1
(6)
另一直角边AB的长度等于上下底座的间距减去套管双耳高度,即:
AB=DB-DA=h1-h2
(7)
根据勾股定律,斜腕臂长度:
(8)
(3)工作支定位环安装位置计算
在ΔJCV中,定位管中心到套管双耳螺栓销处的垂直距离为结构高度减去承力索座高度和套管双耳高度,再减去定位管中心到接触线的垂直高度,即
CV=H-h2-h3-h4
(9)
ΔABC、ΔJSY和ΔJCV为相似三角形,根据相似三角形对应边成比例定律,
JC=BC×CV/AB=(LX+L2)× (H-h2-h3-h4)/(h1-h2)
(10)
JS=AC×SY/AB=(Sp+Cx-m-B1-L4-δ×h1)×h5/(h1-h2)
(11)
定位环到斜腕臂单耳的安装位置:
LDWH=SC=JC-JS=(LX+L2)× (H-h2-h3-h4)/(h1-h2)- (Sp+Cx-m-B1-L4-δ×h1)×h5/(h1-h2)
(12)
(4)工作支定位管长度计算
根据ΔBAC、ΔJSY、ΔJVC相似三角形对应边成比例定律,
JY=BC×SY/AB=(LX+L2)×h5/(h1-h2)
(13)
JV=AC×CV/AB= (Sp+Cx-m-B1-L4-δ×h1)× (H-h2-h3-h4)/(h1-h2))
(14)
定位管的长度:
LDWG=JV-JY+L5= [(Sp+Cx-m-B1-L4-δ×h1)× (H-h2-h3-h4)-(LX+L2)×h5)]/(h1-h2)+L5
(15)
3.2 非工作支平、斜腕臂、定位环安装位置的计算
(1)非工作支平腕臂长度计算
在ΔDRG中:
DR=Sp+Cx-(a2-h0×DH/L)-B1
(16)
GR=h
(17)
(18)
非工作支平腕臂的长度:

(19)
(2)非工作支斜腕臂长度计算
DU=LTP+L1-L3-L4
(20)
在ΔBME中,
DM=EF=UZ-h2
(21)
UZ=GR×DU/DG=h×(LTP+L1-
L3-L4)/(LTP+L1-L3)
(22)
BM=h1+DM=h1+h×(LTP+L1-L3-L4)/ (LTP+L1-L3)-h2
(23)
DF≈DZ=DU×COS(arcsin(GR/DG))
(24)
ME=DF-OA=DU×COS(arcsin(GR/DG))-δ×h1
(25)
非工作支斜腕臂的长度:
(26)
式中:
BM=h1+h×(LTP+L1-L3-L4)/ (LTP+L1-L3)-h2
ME=DU×COS(arcsin(GR/DG))-δ×h1
(3)非工作支定位环安装位置计算
在ΔKXE中,
EX=H-h2-h3-h4
(27)
ΔBME、ΔKLN、ΔKXE为相似三角形,根据相似三角形对应边成比例定律,
KE=BE×EX/BM=(LX+L2)× (H-h2-h3-h4)/[h1+h× (LTP+L1-L3-L4)/ (LTP+L1-L3)-h2]
(28)
KL=ME×LN/BM= [DU×COS(arcsinGR/DG)-δ×h1]×h5/[h×(h1+LTP+L1-L3-L4)/ (LTP+L1-L3)-h2]
(29)
定位环到斜腕臂单耳的安装位置:
LTDWH=LE=KE-KL= (LX+L2)×(H-h2-h3-h4)/ [h×(LTP+L1-L3-L4)/ (LTP+L1-L3)+h1-h2]- [DU×COS(arcsinGR/DG)-δ×h1]×h5/[h×(LTP+L1-L3-L4)/ (LTP+L1-L3)+h1-h2]
(30)
Visual Basic是美国微软公司开发的一种可视化编程工具,已成为Windows流行的编程语言,不必编写大量的代码去描述程序界面,只需要把预先建立好的对象拖放到窗口界面窗口中即可,它具有界面友好、操作简单、事件驱动程序机制的特点。Visual Basic程序运行的基本方法是由“事件”来驱动程序运行。
编写Visual Basic程序,首先设定变量,其次,编写程序代码,再次,点击运行,出现界面窗口,触发事件,得到结果。本文所设计的计算软件,由于具有许多输入数据,所以编程前需在窗体上绘制许多控件(如“请输入侧面限界Cx、请输入上底座宽度B1……”等均为标签Label的题目caption,其后面的“输入栏”为文本框TextBox的text属性,如图3所示。在输入完成后,单击命令按钮Command,引发事件驱动,完成计算过程,瞬间显示计算结果,如图4所示。
程序代码如下:
Public L1,L2,L3,L4,L5,Cx,B1,δ,Sp,H,h,h0,h1,h2,h3,h4,h5,DH,L,a1,a2,LP
LX,LTP,LTX as single′设定公共参数或变量
Cx=Val(text1.text):B1=Val(text2.text):
δ=Val(text3.text) ……
′将字符串转换成数值类型
Private Sub Command1_Click′命令按钮1的单击事件
LP=Sp+Cx-m-L1-B1+L3= δ*(DH+H-h3)+Cx- (a1-h0*DH/L)-L1-B1+L3
LX=sqr(((DH+H-h3)+Cx- (a1-h0*DH/L)-B1-L4-δ*h1)^2 +(h1-h2)^2))-L2
LDWG=((Sp+Cx-m -B1-L4-δ*h1)* ( H-h2-h3-h4)-(LX+L2)* h5))/(h1-h2)+L5
LDWH=(LX+L2)*(H-h2-h3-h4)/ (h1-h2)-(Sp+Cx-m-B1-L4- δ*h1)*h5/(h1-h2)
……′运用编程语言进行计算
Private Sub Command2_Click ′命令按钮2的单击事件
……
LTDWH=(LX+L2)*(H-h2-h3-h4)/ (h*(LTP+L1-L3-L4)/ (LTP+L1-L3)+h1-h2)-(DU*COS(arcsin(GR/DG))-δ*h1)*h5/(h*(LTP+L1-L3-L4)/(LTP+ L1-L3)+h1-h2)
′运用编程语言进行计算
……
End sub′ 程序结束
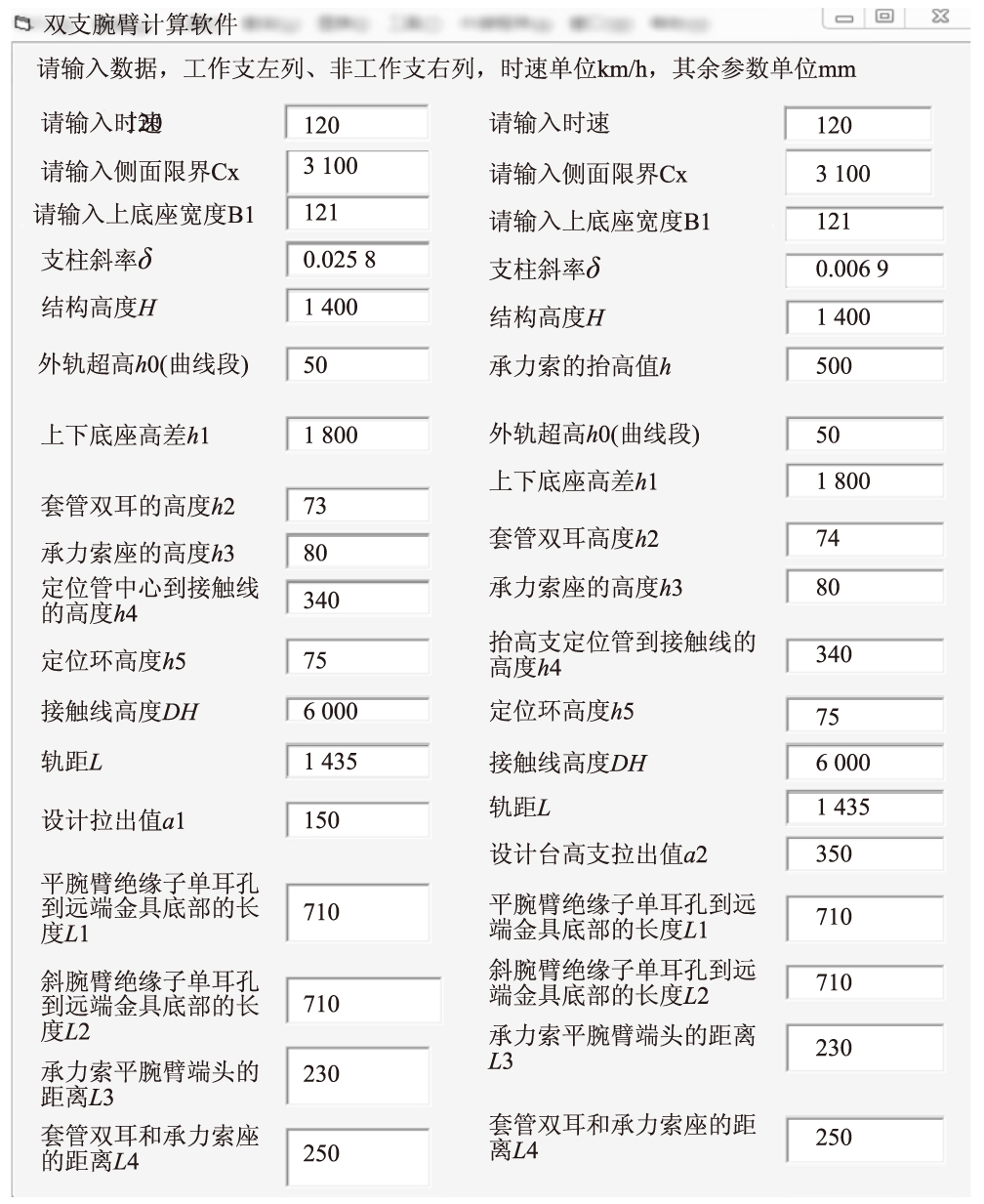
图3 双支腕臂计算输入界面
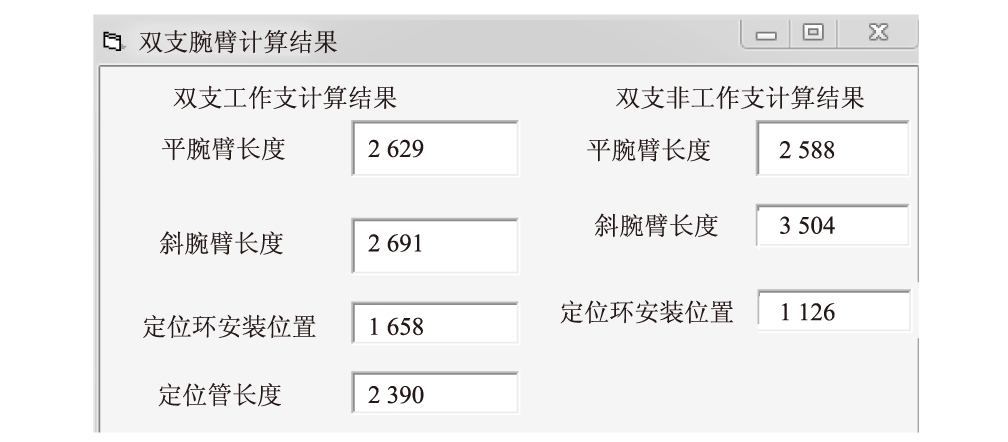
图4 双支腕臂计算输出界面
通过对双支工作支、双支非工作支平、斜腕臂长度、定位管长度、定位环安装位置逐项计算,最后运用Visual Basic 6.0编程工具, 使腕臂计算过程成为一个可安装的软件,在手机、电脑上点击可执行*.exe文件,使之打开界面,进行相关数据的计算,使腕臂计算更加简单化。
参考文献:
[1] 于万聚.高速电气化铁路接触网[M].成都:西南交通大学出版社,2003. YU Wanju. High-speed electrified railway catenary [M]. Chengdu: Southwest Jiaotong University Press, 2003.
[2] 冯燕,陈林,陈道琳.铁路电气化接触网腕臂预配计算[J].电工技术,2013,34(10):51-53. FENG Yan, CHEN Lin,CHEN Daolin. Wrist arm preload calculation of railway electrification catenary [J].Electrician Technology, 2013 ,34(10): 51-53.
[3] 王福成.Visual Basic6.0数据库开发指南[M].北京:清华大学出版社,2002. WANG Fucheng. Visual Basic6.0 database development guide [M].Beijing: Tsinghua University Press ,2002.
[4] 陈再红.利用“Excel”软件进行接触网腕臂预配计算[J].中国西部科技,2011,10(13):19-20. CHEN Zaihong. Using Excel Software to Calculate the Wrist-arm Pre-matching of Catenary [J].West China Science and Technology, 2011,10(13): 19-20.
[5] 常国安,彭昶.京沪线电气化工程接触网腕臂计算分析[J].电气化铁道,2006,7(2):26-28. CHANG Guoan, PENG Chang. Calculation and Analysis of Wrist Arm of Catenary in Electrification Project of Beijing-Shanghai Railway [J]. Electrified Railway, 2006,7(2):26-28.
[6] 王融诚,盛纪军.京秦线接触网直链型平腕臂的计算[J].铁道建筑,2004,44(1):62-63. WANG Rongcheng, SHENG Jijun. Calculation of catenary straight-chain arm of Jing-Qin line [J].Railway Construction ,2004,44(1): 62-63.
[7] 张宏林,周江峰.Visual Basic 6.0 编程实例[M].北京:人民邮电出版社,1999. ZHANG Honglin, ZHOU Jiangfeng. Visual Basic 6.0 programming example [M]. Beijing: People’s Posts and Telecommunications Press,1999.
[8] 吕中枢,田卫华,张爱军.用Visual Basic6.0开发电机的机辅设计程序[J].沈阳电力高等专科学校学报,2002,4(4):1-3. LU Zhongshu, TIAN Weihua, ZHANG Aijun. Development of computer-aided design program with Visual Basic 6.0 [J].Journal of Shenyang Electric Power College,2002,4(4): 1-3.
(编辑:刘会娟 苏玲梅)
Calculation of Catenary Wrist Arm and Development of Program Software with Visual Basic
LI Dongwei
(Baoji Equipment Co., Ltd.,China Railway Electrification Bureau Group Co., Ltd., Baoji 721013, China)
Abstract:The commonly used steel wrist arm calculation method is to establish a mathematical model, the wrist arm device is broken down into several right-angle triangles, by using the Pythagorean theorem and similar triangular law, in the right triangle, the flat wrist arm, oblique wrist arm, positioning tube length, and positioning ring installation location are worked out, majority of which are calculated with Excel forms, the results are relatively accurate, but the interface is not intuitive, the formula is easy to be modified. The wrist arm computational formula is derived in this paper,by using Visual Basic programming software, setting the visual control, defining multiple unknown variables, completing a stereotyped program interface respectively with two program modules. The operator simply inputs the variable value required for each module, the corresponding results can be get, and the wrist arm calculation is greatly simplified.
Key words:wrist arm; positioning ring; positioning tube; calculation; Visual Basic software
收稿日期:2016-12-23
作者简介:李东伟 (1985-),男,工程师。 引文格式:李东伟. 接触网钢腕臂预配计算及用Visual Basic开发程序软件[J].高速铁路技术,2017,8(4):24-27. LI Dongwei. Calculation of Catenary Wrist Arm and Development of Program Software with Visual Basic [J]. High Speed Railway Technology,2017,8(4):24-27.
文章编号:1674—8247(2017)04—0024—04
中图分类号:U225.2
文献标志码:A